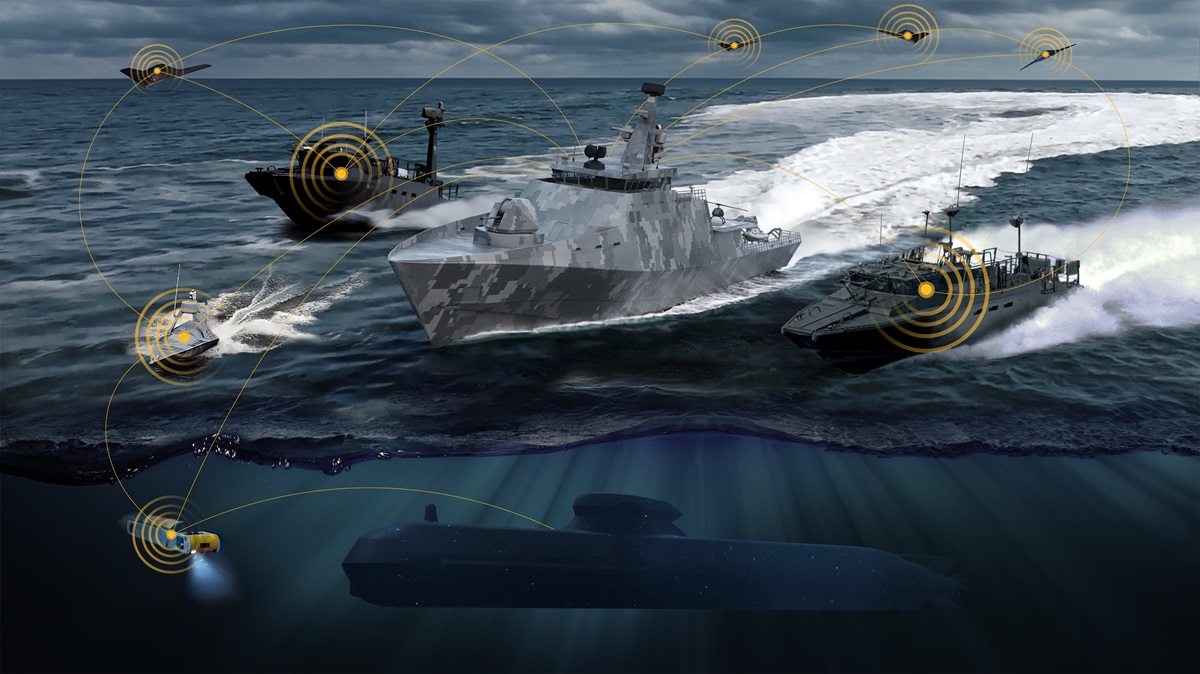

Swedish defense giant Saab has unveiled the “Autonomous Ocean Core,” its latest control system for military and civilian naval platforms.
Integration of this software enables surface and subsurface watercraft to function autonomously on various maritime missions, such as mine detection and clearance, intelligence, surveillance, and reconnaissance, electronic warfare, and rescue missions in remote locations.
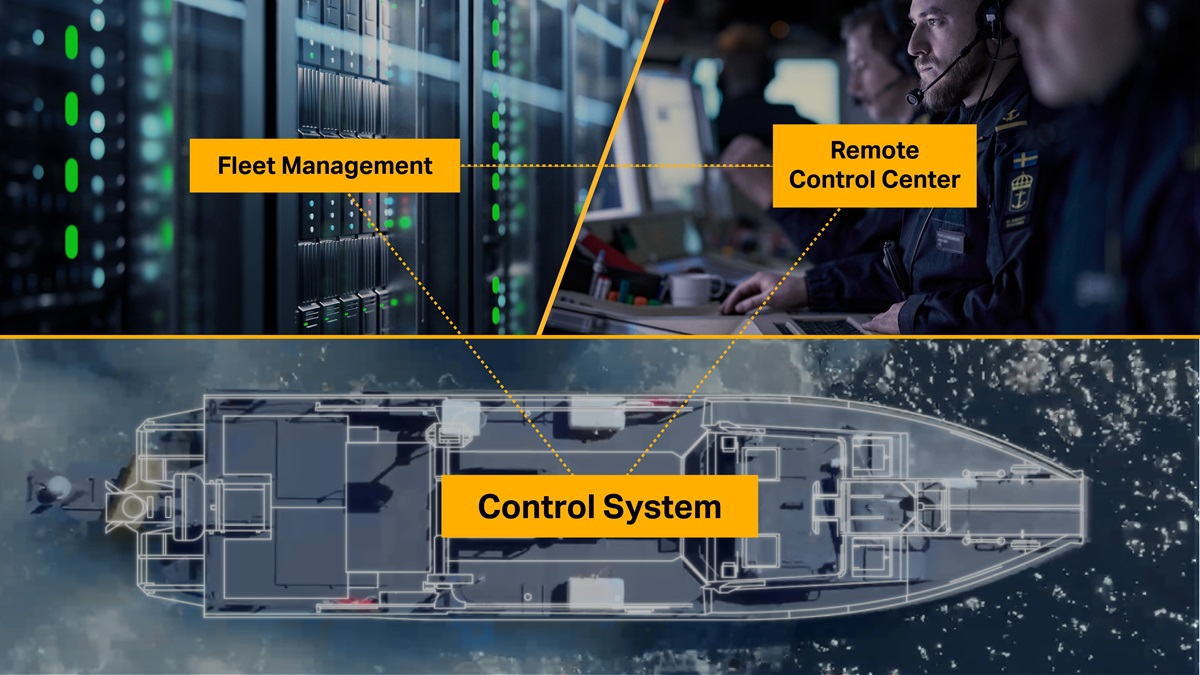
Described as a system “designed for easy integration” where “operators simply input the vessel’s parameters into the motion control function to enable un-crewed operation,” it is implemented at a remote control center located in land, sea, or air.
Saab’s Autonomous Ocean Core is compatible with various vessels from different manufacturers, such as ships, submarines, and uncrewed underwater vehicles.
It features an open architecture with baseline autonomy, including vessel control, enabling operators to set in motion essential functions autonomously right out of the box.
Moreover, the system’s design permits operators to add customizations tailored to specific mission requirements without compromising built-in safety functions.
“The development of naval unmanned and autonomous units is progressing, enhancing capabilities for maritime security operations. Autonomous Ocean Core can boost key operational strengths for the dull, dirty, dangerous and dear,” Senior Vice President and Head of Saab’s Business Area Kockums Mats Wicksell said.
“This control system gives our customers a tactical edge, increasing availability and efficiency and becoming less dependent on active manpower.”
Maneuver Modes
Precise control and operational flexibility for missions are supported through four modes.
Mission maneuver is used during departure and return to port, where the operator sets one or multiple mission points with instructions for different capabilities, behaviors, and payloads.
The second is the vector maneuver, used for “precise control when moving to or from the quay, or for fine-tuning the vessel’s position during a mission.”
A fallback control called the direct maneuver mode is used for vessel recovery if the main link goes down.
Lastly, the position hold is a resting state used when no other mode is active.
Operational Modes
Operators can configure the Autonomous Ocean Core in three ways.
The capability that enables the vessel to perform fully under controlled supervision for safe and guided training is called the Local Safety Mode, which requires a crew member or remote supervisor to activate a safety switch onboard.
Next comes the External Safety Mode that enhances safety within designated zones. This mode prioritizes safety by limiting performance or availability in these areas, so if the connection is lost, the vessel stops automatically.
Lastly, the Assault Mode is an unrestricted setting that allows the vessel to operate without a continuous link and has no performance limits. It is designed for high-risk situations that require maximum operational autonomy.









